# Predictive Tool
## Currently Supported Models
### AGCRN
AGCRN (Adaptive Graph Convolutional Recurrent Network) is a deep nerual network for traffic prediction consisting of two adaptive module and recurrent networks.
- Reference Paper:
- [Bai, L., Yao, L., Li, C., Wang, X., & Wang, C. (2020). Adaptive graph convolutional recurrent network for traffic forecasting.](https://proceedings.neurips.cc/paper/2020/file/ce1aad92b939420fc17005e5461e6f48-Paper.pdf)
- Reference Implementation:
- [Github repository (LeiBAI)](https://github.com/LeiBAI/AGCRN)
### ARIMA
ARIMA (Autoregressive Integrated Moving Average) is a widely used classical statistical model on time series prediction.
- Reference Paper:
+ [Williams, B. M., & Hoel, L. A. (2003). Modeling and forecasting vehicular traffic flow as a seasonal ARIMA process: Theoretical basis and empirical results](https://www3.nd.edu/~busiforc/handouts/ARIMA%20Engineering%20Article.pdf)
- Reference Package: `pandas`, `statsmodels`
### ASTGCN
ASTGCN (Attenion Based Spatial-temporal Graph Convolutional Networks) is a deep neural network for traffic flow forecasting. It models temporal-dependencies from three perspectives using attetion mechanism. And it models spatial-dependencies employing graph convolutions.
- Reference Paper:
- [Guo, S., Lin, Y., Feng, N., Song, C., & Wan, H. (2019, July). Attention based spatial-temporal graph convolutional networks for traffic flow forecasting.](https://ojs.aaai.org/index.php/AAAI/article/view/3881)
- Reference Implementation:
- [Github repository (guoshnBJTU)](https://github.com/guoshnBJTU/ASTGCN-r-pytorch)
### DCRNN
DCRNN (Diffusion Convolutional Recurrent Neural Network) is a deep learning framework for traffic forecasting that incorporates both spatial and temporal dependency in the traffic flow. It captures the spatial dependency using bidirectional random walks on the graph, and the temporal dependency using the encoder-decoder architecture with scheduled sampling.
- Reference Paper:
+ [Li, Y., Yu, R., Shahabi, C., & Liu, Y. (2017). Diffusion convolutional recurrent neural network: Data-driven traffic forecasting](https://arxiv.org/abs/1707.01926)
- Reference Implementation:
+ [A TensorFlow implementation of Diffusion Convolutional Recurrent Neural Network (liyaguang)](https://github.com/liyaguang/DCRNN)
### DeepST
DeepST (Deep learning-based prediction model for Spatial-Temporal data) is composed of three components: 1) temporal dependent instances: describing temporal closeness, period and seasonal trend; 2) convolutional neural networks: capturing near and far spatial dependencies; 3) early and late fusions: fusing similar and different domains' data.
- Reference Paper:
+ [Zhang, J., Zheng, Y., Qi, D., Li, R., & Yi, X. (2016, October). DNN-based prediction model for spatio-temporal data](https://www.microsoft.com/en-us/research/wp-content/uploads/2016/09/DeepST-SIGSPATIAL2016.pdf)
### GeoMAN
GeoMAN (Multi-level Attention Networks for Geo-sensory Time Series Prediction) consists of two major parts: 1) A multi-level attention mechanism (including both local and global spatial attentions in encoder and temporal attention in decoder) to model the dynamic spatio-temporal dependencies; 2) A general fusion module to incorporate the external factors from different domains (e.g., meteorology, time of day and land use).
- Reference Paper:
+ [Liang, Y., Ke, S., Zhang, J., Yi, X., & Zheng, Y. (2018, July). GeoMAN: Multi-level Attention Networks for Geo-sensory Time Series Prediction](https://www.ijcai.org/proceedings/2018/0476.pdf)
- Reference Implementation:
+ [An easy implement of GeoMAN using TensorFlow (yoshall & CastleLiang)](https://github.com/yoshall/GeoMAN)
### GMAN
GMAN (Graph Multi-Attention Network) is a deep nerual network for traffic prediction adopting encoder-decoder architecture. Both encode and decoder consist of multiple spatio-temporal attention blocks to model spatio-temporal dependencies.
- Reference Paper:
- [Zheng, C., Fan, X., Wang, C., & Qi, J. (2020, April). Gman: A graph multi-attention network for traffic prediction.](https://ojs.aaai.org/index.php/AAAI/article/view/5477)
- Reference Implementation:
- [implementation of Graph Multi-Attention Network](https://github.com/zhengchuanpan/GMAN)
### GraphWaveNet
GraphWaveNet is an end-to-end novel graph neural network. It captures spatial dependencies through a self-adptive adjacency matrix. And it captures temporal dependencies through convolutions.
- Reference Paper:
- [Wu, Z., Pan, S., Long, G., Jiang, J., & Zhang, C. (2019). Graph wavenet for deep spatial-temporal graph modeling.](https://www.ijcai.org/proceedings/2019/0264.pdf)
- Reference Implementation:
- [Github repository (nnzhan)](https://github.com/nnzhan/Graph-WaveNet)
### HM (Historical Mean)
HM is a constant model and always forecasts the sample mean of the historical data.
### HMM (Hidden Markov Model)
Hidden Markov Model is a statistical Markov model in which the system being modeled is assumed to be a Markov process with hidden states. It is often used in temporal pattern recognition.
- Reference Paper:
+ [Chen, Z., Wen, J., & Geng, Y. (2016, November). Predicting future traffic using hidden markov models](https://ieeexplore.ieee.org/abstract/document/7785328)
- Reference Package: `hmmlearn`
### STGCN
STGCN (Spatio-temporal Graph Convolutional Networks) is a deep learning framework for traffic forecasting with complete convolutional structures.
- Reference Paper:
- [Yu, B., Yin, H., & Zhu, Z. (2017). Spatio-temporal graph convolutional networks: A deep learning framework for traffic forecasting.](https://www.ijcai.org/proceedings/2018/0505.pdf)
- Reference Implementation:
- [Github repository (VeritasYin)](https://github.com/VeritasYin/STGCN_IJCAI-18)
### STMeta
STMeta is our prediction model, which requires extra graph information as input, and combines Graph Convolution LSTM and Attention mechanism.
- Reference Package: `tensorflow`
### ST-MGCN
ST-MGCN (Spatiotemporal Multi-graph Convolution Network) is a deep learning based model which encoded the non-Euclidean correlations among regions using multiple graphs and explicitly captured them using multi-graph convolution.
- Reference Paper:
+ [Geng, X., Li, Y., Wang, L., Zhang, L., Yang, Q., Ye, J., & Liu, Y. (2019). Spatiotemporal multi-graph convolution network for ride-hailing demand forecasting](https://ieeexplore.ieee.org/abstract/document/7785328)
- Reference Implementation:
+ [A PyTorch implementation of the ST-MGCN model (shawnwang-tech)](https://github.com/shawnwang-tech/ST-MGCN-pytorch)
### ST-ResNet
ST-ResNet is a deep-learning model with an end-to-end structure based on unique properties of spatio-temporal data making use of convolution and residual units.
- Reference Paper:
- [Zhang, J., Zheng, Y., & Qi, D. (2017, February). Deep spatio-temporal residual networks for citywide crowd flows prediction](https://arxiv.org/pdf/1610.00081.pdf)
- Reference Implementation:
- [Github repository (lucktroy)](https://github.com/lucktroy/DeepST/tree/master/scripts/papers/AAAI17)
### STSGCN
STSGCN (Spatial-temporal Synchronous Graph Convolutional Networks) is a deep learning framework for spatial-temporal network data forecasting. It is able to capture spatial-temporal dependencies through a designed spatial-temporal synchronous modeling mechanism.
- Reference Paper:
- [Song, C., Lin, Y., Guo, S., & Wan, H. (2020, April). Spatial-temporal synchronous graph convolutional networks: A new framework for spatial-temporal network data forecasting.](https://ojs.aaai.org/index.php/AAAI/article/view/5438)
- Reference Implementation:
- [Github repository (Davidham3)](https://github.com/Davidham3/STSGCN)
### XGBoost
XGBoost is a gradient boosting machine learning algorithm widely used in flow prediction and other machine learning prediction areas.
- Reference Paper:
- [Alajali, W., Zhou, W., Wen, S., & Wang, Y. (2018). Intersection Traffic Prediction Using Decision Tree Models](https://www.mdpi.com/2073-8994/10/9/386)
- Reference Package: `xgboost`
## Quick Start
### Quick start with STMeta
```python
from UCTB.dataset import NodeTrafficLoader
from UCTB.model import STMeta
from UCTB.evaluation import metric
from UCTB.preprocess.GraphGenerator import GraphGenerator
# Config data loader
data_loader = NodeTrafficLoader(dataset='Bike', city='NYC', graph='Correlation',
closeness_len=6, period_len=7, trend_len=4, normalize=True)
# Build Graph
graph_obj = GraphGenerator(graph='Correlation', data_loader=data_loader)
# Init model object
STMeta_Obj = STMeta(closeness_len=data_loader.closeness_len,
period_len=data_loader.period_len,
trend_len=data_loader.trend_len,
num_node=data_loader.station_number,
num_graph=graph_obj.LM.shape[0],
external_dim=data_loader.external_dim)
# Build tf-graph
STMeta_Obj.build()
# Training
STMeta_Obj.fit(closeness_feature=data_loader.train_closeness,
period_feature=data_loader.train_period,
trend_feature=data_loader.train_trend,
laplace_matrix=graph_obj.LM,
target=data_loader.train_y,
external_feature=data_loader.train_ef,
sequence_length=data_loader.train_sequence_len)
# Predict
prediction = STMeta_Obj.predict(closeness_feature=data_loader.test_closeness,
period_feature=data_loader.test_period,
trend_feature=data_loader.test_trend,
laplace_matrix=graph_obj.LM,
target=data_loader.test_y,
external_feature=data_loader.test_ef,
output_names=['prediction'],
sequence_length=data_loader.test_sequence_len)
# Evaluate
print('Test result', metric.rmse(prediction=data_loader.normalizer.min_max_denormal(prediction['prediction']),
target=data_loader.normalizer.min_max_denormal(data_loader.test_y)))
```
### Quick Start with HM
```python
from UCTB.dataset import NodeTrafficLoader
from UCTB.model import HM
from UCTB.evaluation import metric
data_loader = NodeTrafficLoader(dataset='Bike', city='NYC', closeness_len=1, period_len=1, trend_len=2,
with_lm=False, normalize=False)
hm_obj = HM(c=data_loader.closeness_len, p=data_loader.period_len, t=data_loader.trend_len)
prediction = hm_obj.predict(closeness_feature=data_loader.test_closeness,
period_feature=data_loader.test_period,
trend_feature=data_loader.test_trend)
print('RMSE', metric.rmse(prediction, data_loader.test_y))
```
### Quick Start with ARIMA
```python
import numpy as np
from UCTB.model import ARIMA
from UCTB.dataset import NodeTrafficLoader
from UCTB.evaluation import metric
data_loader = NodeTrafficLoader(dataset='Bike', city='NYC', closeness_len=24, period_len=0, trend_len=0,
with_lm=False, normalize=False)
test_prediction_collector = []
for i in range(data_loader.station_number):
try:
model_obj = ARIMA(time_sequence=data_loader.train_closeness[:, i, -1, 0],
order=[6, 0, 1], seasonal_order=[0, 0, 0, 0])
test_prediction = model_obj.predict(time_sequences=data_loader.test_closeness[:, i, :, 0],
forecast_step=1)
except Exception as e:
print('Converge failed with error', e)
print('Using last as prediction')
test_prediction = data_loader.test_closeness[:, i, -1:, :]
test_prediction_collector.append(test_prediction)
print('Station', i, 'finished')
test_rmse = metric.rmse(np.concatenate(test_prediction_collector, axis=-2), data_loader.test_y)
print('test_rmse', test_rmse)
```
### Quick Start with HMM
```python
import numpy as np
from UCTB.dataset import NodeTrafficLoader
from UCTB.model import HMM
from UCTB.evaluation import metric
data_loader = NodeTrafficLoader(dataset='Bike', city='NYC',
closeness_len=12, period_len=0, trend_len=0,
with_lm=False, normalize=False)
prediction = []
for station_index in range(data_loader.station_number):
# train the hmm model
try:
hmm = HMM(num_components=8, n_iter=100)
hmm.fit(data_loader.train_closeness[:, station_index:station_index+1, -1, 0])
# predict
p = []
for time_index in range(data_loader.test_closeness.shape[0]):
p.append(hmm.predict(data_loader.test_closeness[time_index, station_index, :, :], length=1))
except Exception as e:
print('Failed at station', station_index, 'with error', e)
# using zero as prediction
p = [[[0]] for _ in range(data_loader.test_closeness.shape[0])]
prediction.append(np.array(p)[:, :, 0])
print('Node', station_index, 'finished')
prediction = np.array(prediction).transpose([1, 0, 2])
print('RMSE', metric.rmse(prediction, data_loader.test_y))
```
### Quick Start with XGBoost
```python
import numpy as np
from UCTB.dataset import NodeTrafficLoader
from UCTB.model import XGBoost
from UCTB.evaluation import metric
data_loader = NodeTrafficLoader(dataset='Bike', city='NYC', closeness_len=6, period_len=7, trend_len=4,
with_lm=False, normalize=False)
prediction_test = []
for i in range(data_loader.station_number):
print('*************************************************************')
print('Station', i)
model = XGBoost(n_estimators=100, max_depth=3, objective='reg:squarederror')
model.fit(np.concatenate((data_loader.train_closeness[:, i, :, 0],
data_loader.train_period[:, i, :, 0],
data_loader.train_trend[:, i, :, 0],), axis=-1),
data_loader.train_y[:, i, 0])
p_test = model.predict(np.concatenate((data_loader.test_closeness[:, i, :, 0],
data_loader.test_period[:, i, :, 0],
data_loader.test_trend[:, i, :, 0],), axis=-1))
prediction_test.append(p_test.reshape([-1, 1, 1]))
prediction_test = np.concatenate(prediction_test, axis=-2)
print('Test RMSE', metric.rmse(prediction_test, data_loader.test_y))
```
## Tutorial
The general process of completing a spatiotemporal prediction task includes: loading dataset, defining model, training, testing, model evaluation.

### Load datasets from Urban_dataset
To help better accuse dataset, UCTB provides data loader APIs `UCTB.dataset.data_loader`, which can be used to preprocess data, including **data division**, **normalization**, and **extract temporal and spatial knowledge**.
In the following tutorial, we will illustrate how to use `UCTB.dataset.data_loader` APIs to inspect the speed dataset.
```python
from UCTB.dataset.data_loader import NodeTrafficLoader
```
We use all(data_range='all') of speed data in METR_LA(Assume that scripts are put under root directory, METR_LA dataset is put under `./data` directory.). Firstly, let's initialize a NodeTrafficLoader object:
```python
data_loader = NodeTrafficLoader(city='LA',
data_range='all',
train_data_length='all',
test_ratio=0.1,
closeness_len=6,
period_len=7,
trend_len=4,
target_length=1,
normalize=False,
data_dir='data',
MergeIndex=1,
MergeWay="sum",dataset='METR',remove=False)
```
NodeTrafficLoader is the base class for dataset extracting and processing. Input arguments appeared in constructor above will be explained.
- data range selection
`*data range = 'all'` means that we choose the whole data as our traffic_data to train, test, and predict.
- data spliting(train set and test set spliting)
`train_data length = 'all'` means that we exploit all of the traffic_data. `'train_test_ratio = 0.1` means we divide the dataset into train and test sets. And the train set to the test set is nine to one.
- normalization
`normalization = False` means that we normalized the dataset through min-max-normalization method. When we input False, we simply do not employ any preprocessing tricks on the dataset.
- data merging
`MergeIndex = 1, MergeWay = 'sum'` means that granularity of raw dataset will not be changed. If we try MergeIndex > 1, we can obtain combination of MergeIndex time slots of data in a way of 'sum' or 'average'.
- multiple time series building(temporal knowledge exploiting)
`closeness_len = 6, period_len=7, trend_len=4, target_length=1` means that we create 3 time series, using former consecutive closeness_len time slots of data as a unit, former every other daily_slots time slots of data as a unit(consisting of period_len piece of data), former every other daily_slots*7 time slots of data as a unit(consisting of trend_len piece of data) respectively.
```python
print(data_loader.train_closeness.shape)
print(data_loader.train_period.shape)
print(data_loader.train_trend.shape)
print(data_loader.train_data.shape)
```
```
(22780, 207, 6, 1)
(22780, 207, 7, 1)
(22780, 207, 4, 1)
(30844, 207)
```
You may probably note that the length of train_closeness is 13778 less than that of train_data. It's because we choose the shortest data length among the three series(train_trend) for alignment.
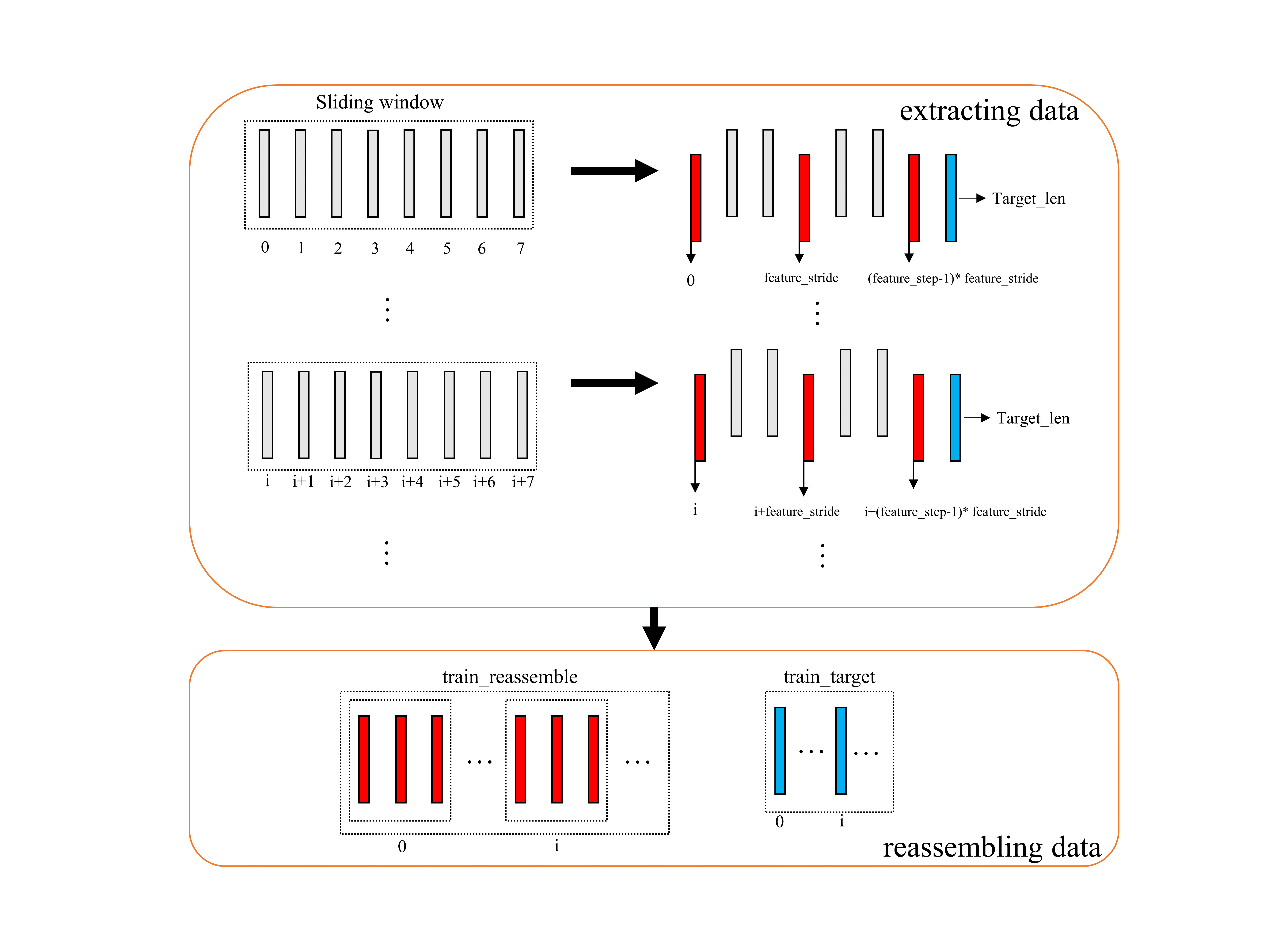 Above is the visualization of a new time series's construction. In this situation, feature_stride = 3(means sampling interval), feature_step = 3(means how many times we sample).Other time series are just the same situation.
Through the process in the figure shown above, we can calculate the length of train_trend is $30844-12*24*7*4=22780$, which is the minimum among three time series.
**Operations**
- Denormalization/Normalization
- Visualization
- Temporal Knowledge Exploitation
- Spatial knowledge Exploration
- Access to raw data
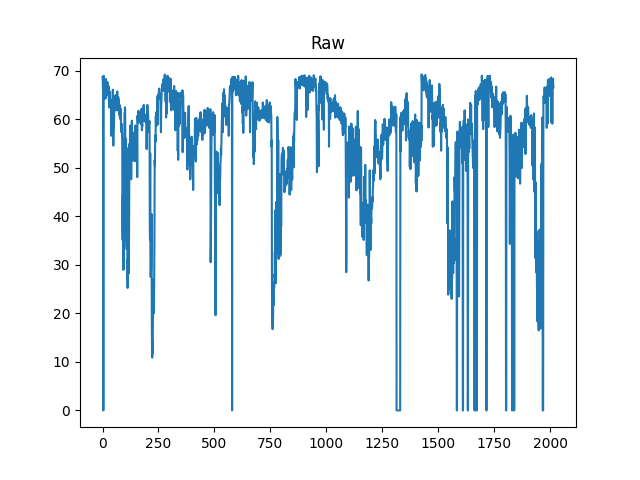
```python
import matplotlib.pyplot as plt
from UCTB.preprocess.preprocessor import Normalizer
# without normalization
target_node = 5
plt.plot(data_loader.traffic_data[:,5])
plt.title('Raw')
plt.show()
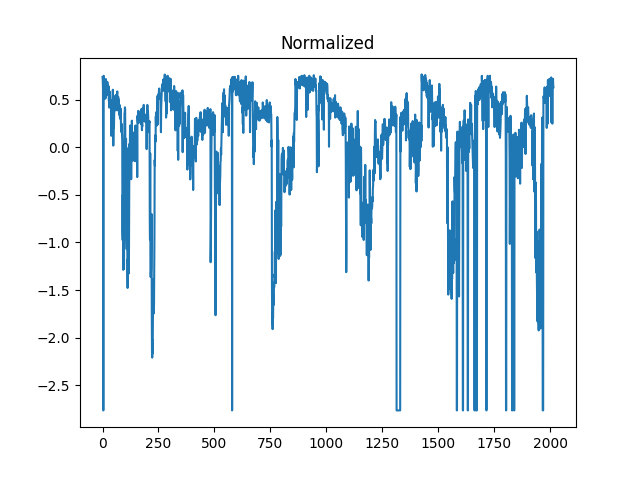
# normalization
normalizer=Normalizer(data_loader.traffic_data)
X_normalized = normalizer.min_max_normal(data_loader.traffic_data)
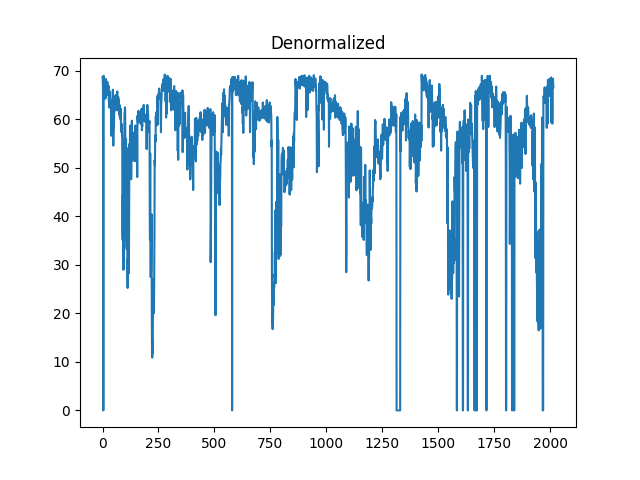
# denormalization
X_denormalized = normalizer.min_max_denormal(X_normalized)
plt.plot(X_normalized[:,5])
plt.title('Normalized')
plt.show()
plt.plot(X_denormalized[:,5])
plt.title('Denormalized')
plt.show()
```
Above is the visualization of a new time series's construction. In this situation, feature_stride = 3(means sampling interval), feature_step = 3(means how many times we sample).Other time series are just the same situation.
Through the process in the figure shown above, we can calculate the length of train_trend is $30844-12*24*7*4=22780$, which is the minimum among three time series.
**Operations**
- Denormalization/Normalization
- Visualization
- Temporal Knowledge Exploitation
- Spatial knowledge Exploration
- Access to raw data
```python
import matplotlib.pyplot as plt
from UCTB.preprocess.preprocessor import Normalizer
# without normalization
target_node = 5
plt.plot(data_loader.traffic_data[:,5])
plt.title('Raw')
plt.show()
# normalization
normalizer=Normalizer(data_loader.traffic_data)
X_normalized = normalizer.min_max_normal(data_loader.traffic_data)
# denormalization
X_denormalized = normalizer.min_max_denormal(X_normalized)
plt.plot(X_normalized[:,5])
plt.title('Normalized')
plt.show()
plt.plot(X_denormalized[:,5])
plt.title('Denormalized')
plt.show()
```
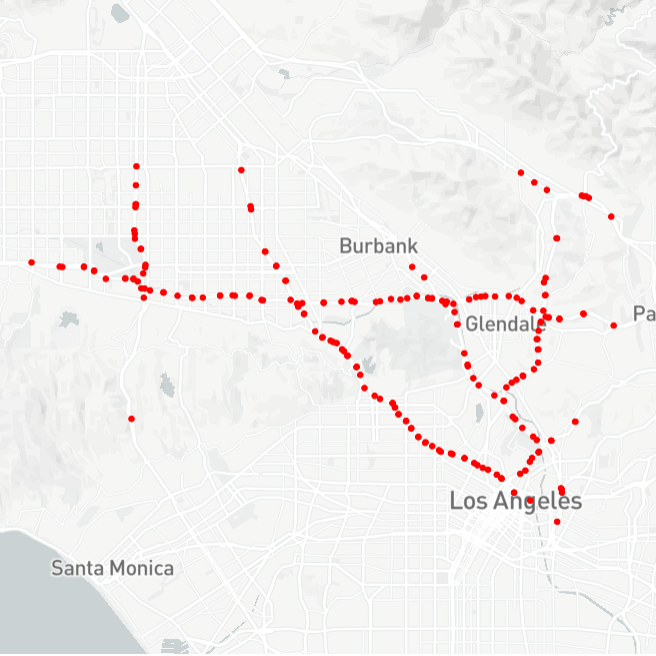
 ```python
# Nodes' location visualizations
data_loader.st_map()
```
Visualization result is as follows:
```python
# Nodes' location visualizations
data_loader.st_map()
```
Visualization result is as follows:
 ```python
# data visualization
import seaborn as sns
import matplotlib.pyplot as plt
real_denormed=data_loader.normalizer.min_max_denormal(data_loader.test_y)
sns.heatmap(real_denormed[:,:,0], cmap='Reds', vmin = -1000, vmax = 4000)
plt.ylabel("Time Slot")
plt.xlabel("Sensor Node")
plt.title("Visualization")
plt.show()
```
```python
# Feature stitching
X = data_loader.make_concat()
print('before concatenate')
print('closeness')
print(data_loader.train_closeness.shape)
print('period')
print(data_loader.train_period.shape)
print('trend')
print(data_loader.train_trend.shape)
print('After concatenate')
print(X.shape)
```
```
before concatenate
closeness
(22780, 207, 6, 1)
period
(22780, 207, 7, 1)
trend
(22780, 207, 4, 1)
After concatenate
(22780, 207, 17, 1)
```
```python
# access to raw data
print(data_loader.traffic_data[0,0])
```
```
64.375
```
### Model definition, train, test and evaluation
We use XGBoost interface in UCTB as an example to define a model. Since there are total 207 stations in METR_LA dataset, we define 207 XGBoost models respectively. They are trained and tested in their own iteration related to stations. Finally, when we evaluate our model, we consider the prediction results as a whole and evaluate it against GroundTruth provided by `data_loader` using [RMSE](https://en.wikipedia.org/wiki/Root-mean-square_deviation) metric.
```python
from UCTB.evaluation import metric
from UCTB.model import XGBoost
import UCTB.evaluation.metric as metric
prediction_test = []
for i in range(data_loader.station_number):
print('*************************************************************')
print('Station', i)
model = XGBoost(n_estimators=100, max_depth=3, objective='reg:squarederror')
model.fit(np.concatenate((data_loader.train_closeness[:, i, :, 0],
data_loader.train_period[:, i, :, 0],
data_loader.train_trend[:, i, :, 0],), axis=-1),
data_loader.train_y[:, i, 0])
p_test = model.predict(np.concatenate((data_loader.test_closeness[:, i, :, 0],
data_loader.test_period[:, i, :, 0],
data_loader.test_trend[:, i, :, 0],), axis=-1))
prediction_test.append(p_test.reshape([-1, 1, 1]))
prediction_test = np.concatenate(prediction_test, axis=-2)
y_truth = data_loader.normalizer.inverse_transform(data_loader.test_y)
y_pred = data_loader.normalizer.inverse_transform(prediction_test)
y_truth = y_truth.reshape([-1,207])
y_pred = y_pred.reshape([-1,207])
print('Test RMSE', metric.rmse(y_pred, y_truth))
plt.title('XGBoost Result')
plt.xlabel('Time Slot')
plt.ylabel('Speed')
plt.plot(y_pred[:12*24*7,target_node])
plt.plot(y_truth[:12*24*7,target_node])
plt.legend(['gt','pred'])
plt.show()
```
```python
# data visualization
import seaborn as sns
import matplotlib.pyplot as plt
real_denormed=data_loader.normalizer.min_max_denormal(data_loader.test_y)
sns.heatmap(real_denormed[:,:,0], cmap='Reds', vmin = -1000, vmax = 4000)
plt.ylabel("Time Slot")
plt.xlabel("Sensor Node")
plt.title("Visualization")
plt.show()
```
```python
# Feature stitching
X = data_loader.make_concat()
print('before concatenate')
print('closeness')
print(data_loader.train_closeness.shape)
print('period')
print(data_loader.train_period.shape)
print('trend')
print(data_loader.train_trend.shape)
print('After concatenate')
print(X.shape)
```
```
before concatenate
closeness
(22780, 207, 6, 1)
period
(22780, 207, 7, 1)
trend
(22780, 207, 4, 1)
After concatenate
(22780, 207, 17, 1)
```
```python
# access to raw data
print(data_loader.traffic_data[0,0])
```
```
64.375
```
### Model definition, train, test and evaluation
We use XGBoost interface in UCTB as an example to define a model. Since there are total 207 stations in METR_LA dataset, we define 207 XGBoost models respectively. They are trained and tested in their own iteration related to stations. Finally, when we evaluate our model, we consider the prediction results as a whole and evaluate it against GroundTruth provided by `data_loader` using [RMSE](https://en.wikipedia.org/wiki/Root-mean-square_deviation) metric.
```python
from UCTB.evaluation import metric
from UCTB.model import XGBoost
import UCTB.evaluation.metric as metric
prediction_test = []
for i in range(data_loader.station_number):
print('*************************************************************')
print('Station', i)
model = XGBoost(n_estimators=100, max_depth=3, objective='reg:squarederror')
model.fit(np.concatenate((data_loader.train_closeness[:, i, :, 0],
data_loader.train_period[:, i, :, 0],
data_loader.train_trend[:, i, :, 0],), axis=-1),
data_loader.train_y[:, i, 0])
p_test = model.predict(np.concatenate((data_loader.test_closeness[:, i, :, 0],
data_loader.test_period[:, i, :, 0],
data_loader.test_trend[:, i, :, 0],), axis=-1))
prediction_test.append(p_test.reshape([-1, 1, 1]))
prediction_test = np.concatenate(prediction_test, axis=-2)
y_truth = data_loader.normalizer.inverse_transform(data_loader.test_y)
y_pred = data_loader.normalizer.inverse_transform(prediction_test)
y_truth = y_truth.reshape([-1,207])
y_pred = y_pred.reshape([-1,207])
print('Test RMSE', metric.rmse(y_pred, y_truth))
plt.title('XGBoost Result')
plt.xlabel('Time Slot')
plt.ylabel('Speed')
plt.plot(y_pred[:12*24*7,target_node])
plt.plot(y_truth[:12*24*7,target_node])
plt.legend(['gt','pred'])
plt.show()
```
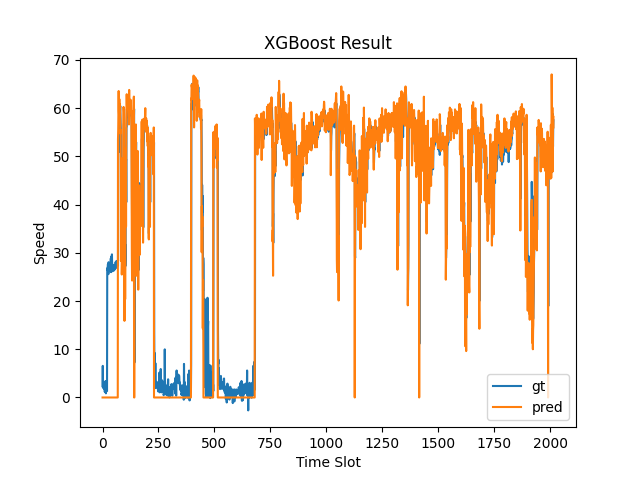 ```
Test RMSE 5.549781682961724
```
### Single vs. Multiple kinds of temporal knowledge
#### Use temporal closeness feature in regression
UCTB provides many classical and popular spatial-temporal predicting models. These models can be used to either predicting series for a single station or all stations. You can find the details in [``UCTB.model``](./static/current_supported_models.html).
The following example shows how to use a **XGBoost** model to handle a simple time series predicting a problem. We will try to predict the bike demands ``test_y`` of a fixed station ``target_node`` in New York City by checking back the historical demands in recent time slots ``train_closeness``.
```python
import numpy as np
import matplotlib.pyplot as plt
from UCTB.model import XGBoost
from UCTB.dataset import NodeTrafficLoader
from UCTB.evaluation import metric
target_node = 233
```
When initializing the loader, we use past ``12`` time slots (timesteps) of closeness as input, ``1`` timestep in the next as output and set the timesteps of other features ``period_len``, ``period_len`` to zero.
```python
data_loader = NodeTrafficLoader(data_range=0.1, dataset='Bike', city='NYC',
closeness_len=12, period_len=0, trend_len=0,
target_length=1, test_ratio=0.2,
normalize=False, with_lm=False, with_tpe=False)
```
The well-loaded data contain all ``717`` stations' data. Therefore it is needed to specify the target station by ``target_station``.
```python
print(data_loader.train_closeness.shape)
print(data_loader.test_closeness.shape)
print(data_loader.test_y.shape)
```
```python
(2967, 717, 12, 1)
(745, 717, 12, 1)
(745, 717, 1)
```
```python
train_x, test_x = data_loader.train_closeness[:, target_node, :, 0], data_loader.test_closeness[:, target_node, :, 0]
train_y = data_loader.train_y[:, target_node,0]
test_y = data_loader.test_y[:, target_node, 0]
```
Inspect the shape of data. Here are the all we need for one-station prediction.
```python
print(train_x.shape)
print(train_y.shape)
print(test_x.shape)
print(test_y.shape)
```
(2967, 12)
(2967,)
(745, 12)
(745,)
Build the XGBoost model.
```python
model = XGBoost(n_estimators=100, max_depth=3, objective='reg:linear')
```
Now, we can fit the model with the train dataset and make predictions on the test dataset.
```python
model.fit(x=train_x)
predictions = model.predict(test_x)
```
We can evaluate the performance of the model by build-in ``UCTB.evaluation`` APIs.
```python
test_rmse = metric.rmse(predictions, test_y)
print(test_rmse)
```
3.6033132
#### Make full use of closeness, period, and trend features
In this case, let's take more temporal knowledge related to ``target_node`` into account. We will concatenate factors including ``closeness``, ``period``, and ``trend``, and use **XGBoost** as the predicting model.
```python
import numpy as np
import matplotlib.pyplot as plt
from UCTB.model import XGBoost
from UCTB.dataset import NodeTrafficLoader
from UCTB.evaluation import metric
target_node = 233
data_loader = NodeTrafficLoader(data_range=0.1, dataset='Bike', city='NYC',
closeness_len=6, period_len=7, trend_len=4,
target_length=1, test_ratio=0.2,
normalize=False, with_lm=False, with_tpe=False)
train_closeness = data_loader.train_closeness[:, target_node, :, 0]
train_period = data_loader.train_period[:, target_nodze, :, 0]
train_trend = data_loader.train_trend[:, target_node, :, 0]
train_y = data_loader.train_y[:, target_node, 0]
test_closeness = data_loader.test_closeness[:, target_node, :, 0]
test_period = data_loader.test_period[:, target_node, :, 0]
test_trend = data_loader.test_trend[:, target_node, :, 0]
test_y = data_loader.test_y[:, target_node, 0]
train_X = np.concatenate([train_closeness, train_period, train_trend], axis=-1)
test_X = np.concatenate([test_closeness, test_period, test_trend], axis=-1)
print(train_X.shape)
print(train_y.shape)
print(test_X.shape)
print(test_y.shape)
model = XGBoost(n_estimators=100, max_depth=3, objective='reg:linear')
model.fit(train_X, train_y)
predictions = model.predict(test_X)
print('Test RMSE', metric.rmse(predictions, test_y))
```
(2307, 17)
(2307,)
(745, 17)
(745,)
Test RMSE 3.3267457
## Advanced Features
### Build your own model using UCTB
UCTB provides extendable APIs to build your own model. Currently, it can support the running of all the ``1.x`` version of **Tensorflow-based** models. In the following tutorial, we will show you how to takes the least efforts to implement a UCTB model.
Commonly, a new model needs to inherit ``BaseModel`` to acquire the features provided by UCTB, such as batch division, early stopping, etc. The necessary components for a subclass of ``BaseModel`` include:
- ``self.__init__()``. Define the model's parameters related to the architecture. You should call the super class's constructor at first.
- ``self.build()``. Build the architecture here. You should construct the graph at the beginning of this function and call the super class's ``build()`` function at the end.
- ``self._input``. The ``dict`` used to record the acceptable inputs of the model, whose keys are the parameter names in ``model.fit()`` and ``model.predict()`` and values are the name of related tensors.
- ``self._output``. The ``dict`` used to record the outputs of the model. You should fill the required keys ``prediction`` and ``loss`` with the names of tensors in your case.
- ``self._op``. The ``dict`` used to define all the operations for the model. Basic usage for it is to record the **training operation**, for example, the minimizing loss operation of an optimizer. Use key ``train_op`` to record it.
For more examples, you can refer to the implementations of build-in models in [``UCTB.model``](../UCTB.model.html#uctb-model-package).
```python
from UCTB.model_unit import BaseModel
class MyModel(BaseModel):
def __init__(self,
code_version='0',
model_dir='my_model',
gpu_device='0',
):
super(MyModel, self).__init__(code_version=code_version,
model_dir=model_dir, gpu_device=gpu_device)
...
def build(self, init_vars=True, max_to_keep=5):
with self._graph.as_default():
...
self._input['inputs'] = inputs.name
self._input['targets'] = targets.name
...
self._output['prediction'] = predictions.name
self._output['loss'] = loss.name
self._op['train_op'] = train_op.name
super(MyModel, self).build(init_vars=init_vars, max_to_keep=5)
```
Next, in a concrete case, we will realize a **Long short-term memory (LSTM)** model to make the all-station prediction that accepts time series of `717` stations and predict the future of them as a whole.
For the mechanism of LSTM, you can refer to
[Gers, F. A., Schmidhuber, J., & Cummins, F. (1999). Learning to forget: Continual prediction with LSTM](https://www.researchgate.net/profile/Felix_Gers/publication/12292425_Learning_to_Forget_Continual_Prediction_with_LSTM/links/5759414608ae9a9c954e84c5/Learning-to-Forget-Continual-Prediction-with-LSTM.pdf).
```python
import numpy as np
import tensorflow as tf
from UCTB.dataset import NodeTrafficLoader
from UCTB.model_unit import BaseModel
from UCTB.preprocess import SplitData
from UCTB.evaluation import metric
```
```python
class LSTM(BaseModel):
def __init__(self,
num_stations,
num_layers,
num_units,
input_steps,
input_dim,
output_steps,
output_dim,
code_version='0',
model_dir='my_lstm',
gpu_device='0'):
super(LSTM, self).__init__(code_version=code_version,
model_dir=model_dir, gpu_device=gpu_device)
self.num_stations = num_stations
self.num_layers = num_layers
self.num_units = num_units
self.input_steps = input_steps
self.input_dim = input_dim
self.output_steps = output_steps
self.output_dim = output_dim
def build(self, init_vars=True, max_to_keep=5):
with self._graph.as_default():
inputs = tf.placeholder(tf.float32, shape=(None, self.num_stations,
self.input_steps, self.input_dim))
targets = tf.placeholder(tf.float32, shape=(None, self.num_stations,
self.output_steps, self.output_dim))
# record the inputs of the model
self._input['inputs'] = inputs.name
self._input['targets'] = targets.name
inputs = tf.reshape(inputs, (-1, self.input_steps, self.num_stations*self.input_dim))
def get_a_cell(num_units):
lstm = tf.nn.rnn_cell.BasicLSTMCell(num_units, state_is_tuple=True)
return lstm
stacked_cells = tf.contrib.rnn.MultiRNNCell([get_a_cell(self.num_units) for _ in range(self.num_layers)], state_is_tuple=True)
outputs, final_state = tf.nn.dynamic_rnn(stacked_cells, inputs, dtype=tf.float32)
stacked_outputs = tf.reshape(outputs, shape=(-1, self.num_units*self.input_steps))
predictions = tf.layers.dense(stacked_outputs, self.output_steps*self.num_stations*self.output_dim)
predictions = tf.reshape(predictions, shape=(-1, self.num_stations, self.output_steps, self.output_dim))
loss = tf.sqrt(tf.reduce_mean(tf.square(predictions - targets)))
train_op = tf.train.AdamOptimizer().minimize(loss)
# record the outputs and the operation of the model
self._output['prediction'] = predictions.name
self._output['loss'] = loss.name
self._op['train_op'] = train_op.name
# must call super class' function to build
super(LSTM, self).build(init_vars=init_vars, max_to_keep=5)
```
Load the dataset by loader and transform them into the formats your model accepts. If the loader APIs are not filled your demands, you can inherit loader and wrapper it according to your desires (see [Quickstart](./quickstart.html) for more details).
```python
data_loader = NodeTrafficLoader(data_range=0.1, dataset='Bike', city='NYC',
closeness_len=6, period_len=0, trend_len=0,
target_length=1, test_ratio=0.2,
normalize=True, with_lm=False, with_tpe=False)
train_y = np.expand_dims(data_loader.train_y, axis=-1)
test_y = np.expand_dims(data_loader.test_y, axis=-1)
```
```python
model = LSTM(num_stations=data_loader.station_number,
num_layers=2,
num_units=512,
input_steps=6,
input_dim=1,
output_steps=1,
output_dim=1)
```
```python
model.build()
print(model.trainable_vars) # count the trainble parameters
```
6821581
Use your model to training and predicting. ``model.fit()`` method presets lots of useful functions, such as batch division and early stopping. Check them in [``UCTB.model_unit.BaseModel.BaseModel.fit``](../UCTB.model_unit.html#UCTB.model_unit.BaseModel.BaseModel.fit).
```python
model.fit(inputs=data_loader.train_closeness,
targets=train_y,
max_epoch=10,
batch_size=64,
sequence_length=data_loader.train_sequence_len,
validate_ratio=0.1)
```
No model found, start training
Running Operation ('train_op',)
Epoch 0: train_loss 0.016053785 val_loss 0.01606118
Epoch 1: train_loss 0.015499311 val_loss 0.015820855
Epoch 2: train_loss 0.015298592 val_loss 0.015657894
Epoch 3: train_loss 0.015163456 val_loss 0.015559187
Epoch 4: train_loss 0.015066812 val_loss 0.015342651
Epoch 5: train_loss 0.015016247 val_loss 0.015287879
Epoch 6: train_loss 0.014899823 val_loss 0.015249459
Epoch 7: train_loss 0.014773054 val_loss 0.015098239
Epoch 8: train_loss 0.014655286 val_loss 0.015097916
Epoch 9: train_loss 0.014558283 val_loss 0.015108417
```python
predictions = model.predict(inputs=data_loader.test_closeness,
sequence_length=data_loader.test_sequence_len)
```
Reverse the normalization by ``data_loader`` and evaluate the results:
```python
predictions = data_loader.normalizer.inverse_transform(predictions['prediction'])
targets = data_loader.normalizer.inverse_transform(test_y)
print('Test result', metric.rmse(prediction=predictions, target=targets))
```
Test result 2.9765626570592545
Since we only use a short period of the dataset (``data_range=0.1``) in this toy example, the result looks good compared with the [experiment](./all_results.html#results-on-bike). You can also take a try to test the completed dataset on your model.
### Build your own graph with STMeta
Next, we will use the Top-K graph as an example to illustrate how to build customized graphs in UCTB. All of the code in this section can be found [here](https://anonymous.4open.science/r/561305b5-e65e-46c6-9371-ae76b85109ee/Experiments/CustomizedDemo/).
**Top-K graph**
First of all, the customized graphs used in this section is called Top-K graph. We construct the corresponding adjacent graph by marking the point pair that consist of each point and its nearest K points as 1, and the others are marked as 0. Then, we use the adjacent graph to generate the laplacian matrix for input. The hyperparameter K is designed via ad-hoc heuristics. In this demonstration, we chose 23 as the value of K.
**Realize TopK graph analysis module**
To adopt customized graphs (***e.g.,*** Top-K) in UCTB, you should first build your own analysis class by inheriting `UCTB.preprocess.GraphGenerator class`.
It is worth noting that the ultimate goal is to generate the member variables: `self.LM` and `self.AM`, which is the input matrix of the graph. In this phase, we need to make the corresponding analytical implementation according to the type of the custom graph passed in.
```python
# "UCTB/preprocess/topKGraph.py"
import heapq
import numpy as np
from UCTB.preprocess.GraphGenerator import GraphGenerator
# Define the class: topKGraph
class topKGraph(GraphGenerator): # Init NodeTrafficLoader
def __init__(self,**kwargs):
super(topKGraph, self).__init__(**kwargs)
for graph_name in kwargs['graph'].split('-'):
# As the basic graph is implemented in GraphGenerator, you only need to implement your own graph function instead of the existing one.
if graph_name.lower() == 'topk':
lat_lng_list = np.array([[float(e1) for e1 in e[2:4]]
for e in self.dataset.node_station_info])
# Handling
AM = self.neighbour_adjacent(lat_lng_list[self.traffic_data_index],
threshold=int(kwargs['threshold_neighbour']))
LM = self.adjacent_to_laplacian(AM)
if self.AM.shape[0] == 0: # Make AM
self.AM = np.array([AM], dtype=np.float32)
else:
self.AM = np.vstack((self.AM, (AM[np.newaxis, :])))
if self.LM.shape[0] == 0: # Make LM
self.LM = np.array([LM], dtype=np.float32)
else:
self.LM = np.vstack((self.LM, (LM[np.newaxis, :])))
# Implement the details of building the Top-K graph.
def neighbour_adjacent(self, lat_lng_list, threshold):
adjacent_matrix = np.zeros([len(lat_lng_list), len(lat_lng_list)])
for i in range(len(lat_lng_list)):
for j in range(len(lat_lng_list)):
adjacent_matrix[i][j] = self.haversine(
lat_lng_list[i][0], lat_lng_list[i][1], lat_lng_list[j][0], lat_lng_list[j][1])
dis_matrix = adjacent_matrix.astype(np.float32)
for i in range(len(dis_matrix)):
ind = heapq.nlargest(threshold, range(len(dis_matrix[i])), dis_matrix[i].take)
dis_matrix[i] = np.array([0 for _ in range(len(dis_matrix[i]))])
dis_matrix[i][ind] = 1
adjacent_matrix = (adjacent_matrix == 1).astype(np.float32)
return adjacent_matrix
```
**Redefine the call statement of the above class**
```python
# "UCTB/Experiments/CustomizedDemo/STMeta_Obj_topk.py"
# Import the Class: topKGraph
from topKGraph import topKGraph
# Call topKGraph to initialize and generate AM and LM
graphBuilder = topKGraph(graph=args['graph'],
data_loader=data_loader,
threshold_distance=args['threshold_distance'],
threshold_correlation=args['threshold_correlation'],
threshold_interaction=args['threshold_interaction'],
threshold_neighbour=args['threshold_neighbour'])
# ......
```
**Modify the function call location**
Add the new graph name when fitting model and then execute it for experiments. [code](https://github.com/uctb/UCTB/blob/master/Experiments/CustomizedDemo/Runner_topk.py)
```python
os.system('python STMeta_Obj_topk.py -m STMeta_v1.model.yml -d metro_shanghai.data.yml '
'-p graph:Distance-Correlation-Line-TopK,MergeIndex:12')
```
We conduct experiments on `Metro_Shanghai` dataset and use the [STMeta_V1](https://uctb.github.io/UCTB/md_file/all_results.html#stmeta-version) to model both "Distance-Correlation-Line" graph and "Distance-Correlation-Line-TopK" and the results are following:
| **Metro: Shanghai** | Graph | Test-RMSE |
| :-----------------: | :----------------------------: | :-------: |
| STMeta_V1 | Distance-Correlation-Line | 153.17 |
| STMeta_V1 | Distance-Correlation-Line-TopK | 140.82 |
The results show that the performance of STMeta_V1 with the graph "Distance-Correlation-Line-TopK" is better than "Distance-Correlation-Line" model and the RMSE is reduced by about 12.4%, which validates the effectiveness of the topk graph for spatiotemporal modeling STMeta algorithm.
------
[Back To HomePage](../index.html)
```
Test RMSE 5.549781682961724
```
### Single vs. Multiple kinds of temporal knowledge
#### Use temporal closeness feature in regression
UCTB provides many classical and popular spatial-temporal predicting models. These models can be used to either predicting series for a single station or all stations. You can find the details in [``UCTB.model``](./static/current_supported_models.html).
The following example shows how to use a **XGBoost** model to handle a simple time series predicting a problem. We will try to predict the bike demands ``test_y`` of a fixed station ``target_node`` in New York City by checking back the historical demands in recent time slots ``train_closeness``.
```python
import numpy as np
import matplotlib.pyplot as plt
from UCTB.model import XGBoost
from UCTB.dataset import NodeTrafficLoader
from UCTB.evaluation import metric
target_node = 233
```
When initializing the loader, we use past ``12`` time slots (timesteps) of closeness as input, ``1`` timestep in the next as output and set the timesteps of other features ``period_len``, ``period_len`` to zero.
```python
data_loader = NodeTrafficLoader(data_range=0.1, dataset='Bike', city='NYC',
closeness_len=12, period_len=0, trend_len=0,
target_length=1, test_ratio=0.2,
normalize=False, with_lm=False, with_tpe=False)
```
The well-loaded data contain all ``717`` stations' data. Therefore it is needed to specify the target station by ``target_station``.
```python
print(data_loader.train_closeness.shape)
print(data_loader.test_closeness.shape)
print(data_loader.test_y.shape)
```
```python
(2967, 717, 12, 1)
(745, 717, 12, 1)
(745, 717, 1)
```
```python
train_x, test_x = data_loader.train_closeness[:, target_node, :, 0], data_loader.test_closeness[:, target_node, :, 0]
train_y = data_loader.train_y[:, target_node,0]
test_y = data_loader.test_y[:, target_node, 0]
```
Inspect the shape of data. Here are the all we need for one-station prediction.
```python
print(train_x.shape)
print(train_y.shape)
print(test_x.shape)
print(test_y.shape)
```
(2967, 12)
(2967,)
(745, 12)
(745,)
Build the XGBoost model.
```python
model = XGBoost(n_estimators=100, max_depth=3, objective='reg:linear')
```
Now, we can fit the model with the train dataset and make predictions on the test dataset.
```python
model.fit(x=train_x)
predictions = model.predict(test_x)
```
We can evaluate the performance of the model by build-in ``UCTB.evaluation`` APIs.
```python
test_rmse = metric.rmse(predictions, test_y)
print(test_rmse)
```
3.6033132
#### Make full use of closeness, period, and trend features
In this case, let's take more temporal knowledge related to ``target_node`` into account. We will concatenate factors including ``closeness``, ``period``, and ``trend``, and use **XGBoost** as the predicting model.
```python
import numpy as np
import matplotlib.pyplot as plt
from UCTB.model import XGBoost
from UCTB.dataset import NodeTrafficLoader
from UCTB.evaluation import metric
target_node = 233
data_loader = NodeTrafficLoader(data_range=0.1, dataset='Bike', city='NYC',
closeness_len=6, period_len=7, trend_len=4,
target_length=1, test_ratio=0.2,
normalize=False, with_lm=False, with_tpe=False)
train_closeness = data_loader.train_closeness[:, target_node, :, 0]
train_period = data_loader.train_period[:, target_nodze, :, 0]
train_trend = data_loader.train_trend[:, target_node, :, 0]
train_y = data_loader.train_y[:, target_node, 0]
test_closeness = data_loader.test_closeness[:, target_node, :, 0]
test_period = data_loader.test_period[:, target_node, :, 0]
test_trend = data_loader.test_trend[:, target_node, :, 0]
test_y = data_loader.test_y[:, target_node, 0]
train_X = np.concatenate([train_closeness, train_period, train_trend], axis=-1)
test_X = np.concatenate([test_closeness, test_period, test_trend], axis=-1)
print(train_X.shape)
print(train_y.shape)
print(test_X.shape)
print(test_y.shape)
model = XGBoost(n_estimators=100, max_depth=3, objective='reg:linear')
model.fit(train_X, train_y)
predictions = model.predict(test_X)
print('Test RMSE', metric.rmse(predictions, test_y))
```
(2307, 17)
(2307,)
(745, 17)
(745,)
Test RMSE 3.3267457
## Advanced Features
### Build your own model using UCTB
UCTB provides extendable APIs to build your own model. Currently, it can support the running of all the ``1.x`` version of **Tensorflow-based** models. In the following tutorial, we will show you how to takes the least efforts to implement a UCTB model.
Commonly, a new model needs to inherit ``BaseModel`` to acquire the features provided by UCTB, such as batch division, early stopping, etc. The necessary components for a subclass of ``BaseModel`` include:
- ``self.__init__()``. Define the model's parameters related to the architecture. You should call the super class's constructor at first.
- ``self.build()``. Build the architecture here. You should construct the graph at the beginning of this function and call the super class's ``build()`` function at the end.
- ``self._input``. The ``dict`` used to record the acceptable inputs of the model, whose keys are the parameter names in ``model.fit()`` and ``model.predict()`` and values are the name of related tensors.
- ``self._output``. The ``dict`` used to record the outputs of the model. You should fill the required keys ``prediction`` and ``loss`` with the names of tensors in your case.
- ``self._op``. The ``dict`` used to define all the operations for the model. Basic usage for it is to record the **training operation**, for example, the minimizing loss operation of an optimizer. Use key ``train_op`` to record it.
For more examples, you can refer to the implementations of build-in models in [``UCTB.model``](../UCTB.model.html#uctb-model-package).
```python
from UCTB.model_unit import BaseModel
class MyModel(BaseModel):
def __init__(self,
code_version='0',
model_dir='my_model',
gpu_device='0',
):
super(MyModel, self).__init__(code_version=code_version,
model_dir=model_dir, gpu_device=gpu_device)
...
def build(self, init_vars=True, max_to_keep=5):
with self._graph.as_default():
...
self._input['inputs'] = inputs.name
self._input['targets'] = targets.name
...
self._output['prediction'] = predictions.name
self._output['loss'] = loss.name
self._op['train_op'] = train_op.name
super(MyModel, self).build(init_vars=init_vars, max_to_keep=5)
```
Next, in a concrete case, we will realize a **Long short-term memory (LSTM)** model to make the all-station prediction that accepts time series of `717` stations and predict the future of them as a whole.
For the mechanism of LSTM, you can refer to
[Gers, F. A., Schmidhuber, J., & Cummins, F. (1999). Learning to forget: Continual prediction with LSTM](https://www.researchgate.net/profile/Felix_Gers/publication/12292425_Learning_to_Forget_Continual_Prediction_with_LSTM/links/5759414608ae9a9c954e84c5/Learning-to-Forget-Continual-Prediction-with-LSTM.pdf).
```python
import numpy as np
import tensorflow as tf
from UCTB.dataset import NodeTrafficLoader
from UCTB.model_unit import BaseModel
from UCTB.preprocess import SplitData
from UCTB.evaluation import metric
```
```python
class LSTM(BaseModel):
def __init__(self,
num_stations,
num_layers,
num_units,
input_steps,
input_dim,
output_steps,
output_dim,
code_version='0',
model_dir='my_lstm',
gpu_device='0'):
super(LSTM, self).__init__(code_version=code_version,
model_dir=model_dir, gpu_device=gpu_device)
self.num_stations = num_stations
self.num_layers = num_layers
self.num_units = num_units
self.input_steps = input_steps
self.input_dim = input_dim
self.output_steps = output_steps
self.output_dim = output_dim
def build(self, init_vars=True, max_to_keep=5):
with self._graph.as_default():
inputs = tf.placeholder(tf.float32, shape=(None, self.num_stations,
self.input_steps, self.input_dim))
targets = tf.placeholder(tf.float32, shape=(None, self.num_stations,
self.output_steps, self.output_dim))
# record the inputs of the model
self._input['inputs'] = inputs.name
self._input['targets'] = targets.name
inputs = tf.reshape(inputs, (-1, self.input_steps, self.num_stations*self.input_dim))
def get_a_cell(num_units):
lstm = tf.nn.rnn_cell.BasicLSTMCell(num_units, state_is_tuple=True)
return lstm
stacked_cells = tf.contrib.rnn.MultiRNNCell([get_a_cell(self.num_units) for _ in range(self.num_layers)], state_is_tuple=True)
outputs, final_state = tf.nn.dynamic_rnn(stacked_cells, inputs, dtype=tf.float32)
stacked_outputs = tf.reshape(outputs, shape=(-1, self.num_units*self.input_steps))
predictions = tf.layers.dense(stacked_outputs, self.output_steps*self.num_stations*self.output_dim)
predictions = tf.reshape(predictions, shape=(-1, self.num_stations, self.output_steps, self.output_dim))
loss = tf.sqrt(tf.reduce_mean(tf.square(predictions - targets)))
train_op = tf.train.AdamOptimizer().minimize(loss)
# record the outputs and the operation of the model
self._output['prediction'] = predictions.name
self._output['loss'] = loss.name
self._op['train_op'] = train_op.name
# must call super class' function to build
super(LSTM, self).build(init_vars=init_vars, max_to_keep=5)
```
Load the dataset by loader and transform them into the formats your model accepts. If the loader APIs are not filled your demands, you can inherit loader and wrapper it according to your desires (see [Quickstart](./quickstart.html) for more details).
```python
data_loader = NodeTrafficLoader(data_range=0.1, dataset='Bike', city='NYC',
closeness_len=6, period_len=0, trend_len=0,
target_length=1, test_ratio=0.2,
normalize=True, with_lm=False, with_tpe=False)
train_y = np.expand_dims(data_loader.train_y, axis=-1)
test_y = np.expand_dims(data_loader.test_y, axis=-1)
```
```python
model = LSTM(num_stations=data_loader.station_number,
num_layers=2,
num_units=512,
input_steps=6,
input_dim=1,
output_steps=1,
output_dim=1)
```
```python
model.build()
print(model.trainable_vars) # count the trainble parameters
```
6821581
Use your model to training and predicting. ``model.fit()`` method presets lots of useful functions, such as batch division and early stopping. Check them in [``UCTB.model_unit.BaseModel.BaseModel.fit``](../UCTB.model_unit.html#UCTB.model_unit.BaseModel.BaseModel.fit).
```python
model.fit(inputs=data_loader.train_closeness,
targets=train_y,
max_epoch=10,
batch_size=64,
sequence_length=data_loader.train_sequence_len,
validate_ratio=0.1)
```
No model found, start training
Running Operation ('train_op',)
Epoch 0: train_loss 0.016053785 val_loss 0.01606118
Epoch 1: train_loss 0.015499311 val_loss 0.015820855
Epoch 2: train_loss 0.015298592 val_loss 0.015657894
Epoch 3: train_loss 0.015163456 val_loss 0.015559187
Epoch 4: train_loss 0.015066812 val_loss 0.015342651
Epoch 5: train_loss 0.015016247 val_loss 0.015287879
Epoch 6: train_loss 0.014899823 val_loss 0.015249459
Epoch 7: train_loss 0.014773054 val_loss 0.015098239
Epoch 8: train_loss 0.014655286 val_loss 0.015097916
Epoch 9: train_loss 0.014558283 val_loss 0.015108417
```python
predictions = model.predict(inputs=data_loader.test_closeness,
sequence_length=data_loader.test_sequence_len)
```
Reverse the normalization by ``data_loader`` and evaluate the results:
```python
predictions = data_loader.normalizer.inverse_transform(predictions['prediction'])
targets = data_loader.normalizer.inverse_transform(test_y)
print('Test result', metric.rmse(prediction=predictions, target=targets))
```
Test result 2.9765626570592545
Since we only use a short period of the dataset (``data_range=0.1``) in this toy example, the result looks good compared with the [experiment](./all_results.html#results-on-bike). You can also take a try to test the completed dataset on your model.
### Build your own graph with STMeta
Next, we will use the Top-K graph as an example to illustrate how to build customized graphs in UCTB. All of the code in this section can be found [here](https://anonymous.4open.science/r/561305b5-e65e-46c6-9371-ae76b85109ee/Experiments/CustomizedDemo/).
**Top-K graph**
First of all, the customized graphs used in this section is called Top-K graph. We construct the corresponding adjacent graph by marking the point pair that consist of each point and its nearest K points as 1, and the others are marked as 0. Then, we use the adjacent graph to generate the laplacian matrix for input. The hyperparameter K is designed via ad-hoc heuristics. In this demonstration, we chose 23 as the value of K.
**Realize TopK graph analysis module**
To adopt customized graphs (***e.g.,*** Top-K) in UCTB, you should first build your own analysis class by inheriting `UCTB.preprocess.GraphGenerator class`.
It is worth noting that the ultimate goal is to generate the member variables: `self.LM` and `self.AM`, which is the input matrix of the graph. In this phase, we need to make the corresponding analytical implementation according to the type of the custom graph passed in.
```python
# "UCTB/preprocess/topKGraph.py"
import heapq
import numpy as np
from UCTB.preprocess.GraphGenerator import GraphGenerator
# Define the class: topKGraph
class topKGraph(GraphGenerator): # Init NodeTrafficLoader
def __init__(self,**kwargs):
super(topKGraph, self).__init__(**kwargs)
for graph_name in kwargs['graph'].split('-'):
# As the basic graph is implemented in GraphGenerator, you only need to implement your own graph function instead of the existing one.
if graph_name.lower() == 'topk':
lat_lng_list = np.array([[float(e1) for e1 in e[2:4]]
for e in self.dataset.node_station_info])
# Handling
AM = self.neighbour_adjacent(lat_lng_list[self.traffic_data_index],
threshold=int(kwargs['threshold_neighbour']))
LM = self.adjacent_to_laplacian(AM)
if self.AM.shape[0] == 0: # Make AM
self.AM = np.array([AM], dtype=np.float32)
else:
self.AM = np.vstack((self.AM, (AM[np.newaxis, :])))
if self.LM.shape[0] == 0: # Make LM
self.LM = np.array([LM], dtype=np.float32)
else:
self.LM = np.vstack((self.LM, (LM[np.newaxis, :])))
# Implement the details of building the Top-K graph.
def neighbour_adjacent(self, lat_lng_list, threshold):
adjacent_matrix = np.zeros([len(lat_lng_list), len(lat_lng_list)])
for i in range(len(lat_lng_list)):
for j in range(len(lat_lng_list)):
adjacent_matrix[i][j] = self.haversine(
lat_lng_list[i][0], lat_lng_list[i][1], lat_lng_list[j][0], lat_lng_list[j][1])
dis_matrix = adjacent_matrix.astype(np.float32)
for i in range(len(dis_matrix)):
ind = heapq.nlargest(threshold, range(len(dis_matrix[i])), dis_matrix[i].take)
dis_matrix[i] = np.array([0 for _ in range(len(dis_matrix[i]))])
dis_matrix[i][ind] = 1
adjacent_matrix = (adjacent_matrix == 1).astype(np.float32)
return adjacent_matrix
```
**Redefine the call statement of the above class**
```python
# "UCTB/Experiments/CustomizedDemo/STMeta_Obj_topk.py"
# Import the Class: topKGraph
from topKGraph import topKGraph
# Call topKGraph to initialize and generate AM and LM
graphBuilder = topKGraph(graph=args['graph'],
data_loader=data_loader,
threshold_distance=args['threshold_distance'],
threshold_correlation=args['threshold_correlation'],
threshold_interaction=args['threshold_interaction'],
threshold_neighbour=args['threshold_neighbour'])
# ......
```
**Modify the function call location**
Add the new graph name when fitting model and then execute it for experiments. [code](https://github.com/uctb/UCTB/blob/master/Experiments/CustomizedDemo/Runner_topk.py)
```python
os.system('python STMeta_Obj_topk.py -m STMeta_v1.model.yml -d metro_shanghai.data.yml '
'-p graph:Distance-Correlation-Line-TopK,MergeIndex:12')
```
We conduct experiments on `Metro_Shanghai` dataset and use the [STMeta_V1](https://uctb.github.io/UCTB/md_file/all_results.html#stmeta-version) to model both "Distance-Correlation-Line" graph and "Distance-Correlation-Line-TopK" and the results are following:
| **Metro: Shanghai** | Graph | Test-RMSE |
| :-----------------: | :----------------------------: | :-------: |
| STMeta_V1 | Distance-Correlation-Line | 153.17 |
| STMeta_V1 | Distance-Correlation-Line-TopK | 140.82 |
The results show that the performance of STMeta_V1 with the graph "Distance-Correlation-Line-TopK" is better than "Distance-Correlation-Line" model and the RMSE is reduced by about 12.4%, which validates the effectiveness of the topk graph for spatiotemporal modeling STMeta algorithm.
------
[Back To HomePage](../index.html)